So having built an R5 and R4 dome, that dont have all the flappy panels, they needed more life. :) I will do a blog update for each dome when complete. But thought someone might benefit from our findings with vapes for bad motivators.
I started by making motivators and lifters for R4 and R5. The lifter is a liner slide and a servo, simple but effective, and solid enough for this role. As long as the motivators arent too heavy they will work well, im only testing them at 5v, but on R4 i will run the servo at 6v, so should be a little quicker.




After consulting with James Short, we decided to go for a sub ohm vape solution, and to be able to tweak it for best effect we needed a proper vaping solution. James had a mod box pcb and a few other bits, so i bought a small 12v pump, some hose and a few tanks and adaptors.
When we got all the bits together, we found we were short of buttons and screen, and most importantly a suitable battery. So for testing we rigged our chosen tank and the pump but used an off the shelf vaping box for the power and control.
The pump isnt very powerful, but is great for our needs, and by keeping hoses short the pressure needed is low. :) This will be controlled via a relay connecting it directly to 12v, and will be timed to suit the look.
The trigger will also be fired using a relay, in place of the button. Looks like about 5s of firing will be perfect, maybe with a couple of seconds extra blow to clear out the system.
So all mocked up, we connected it to R5's motivator and lifter and gave it a proper test and tweak. The results were great, might have to turn it down. :D
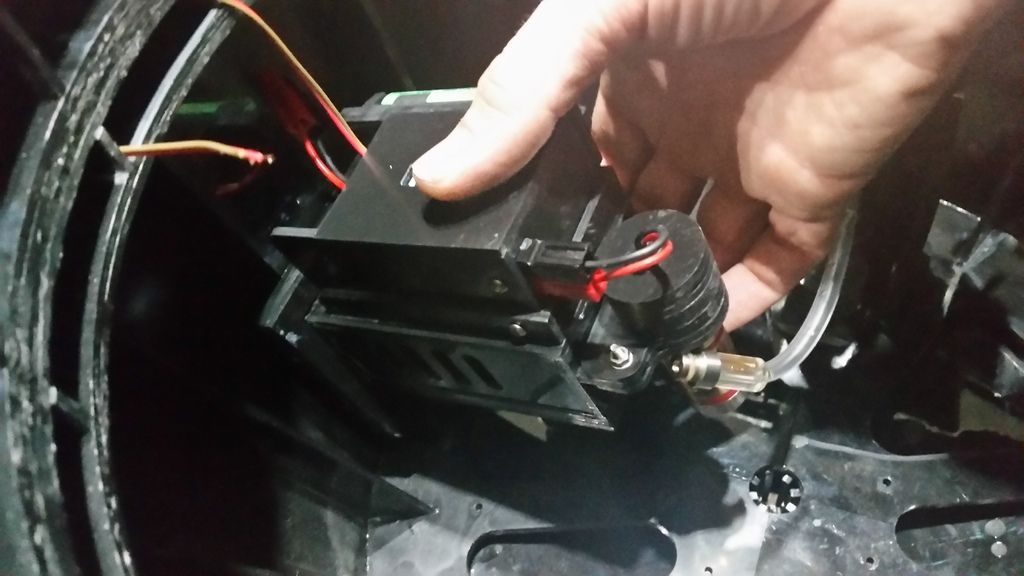
I then cut the housings, the pump is mounted in a box with the hose connecting via a small section of heat shrink directly into the tank vent, and the relays for the pump and trigger control are mounted to that. The tank and wiring are removable, for easy filling and service, And the mod box and battery mount to the tank box but can be removed for testing and setup.
For this version i havent added buttons, once setup it should just run. Will find out of i need them, if i do i will redo the modbox.
In order to be able to mount this in several domes, i added steel discs .8mm below the surface, and magnets to the mount, the box then slides onto the mount and clicks in.







R5 mount:

Battery 18650 £6.50
Battery holder £2 (already had, cheers James)
DNA 40D PCB and Screen £42 (already had, cheers James, but needed £11 replacement screen)
USB charge board £6 (already had, cheers James)
Subtank Mini Mk1 £20 (already had, cheers James)
Tank power mount £1
12v Pump £1.39
5v relay dual board £5 (already had)
6mm OD 3mm OD Hose £3
Plus fluid. :( So not cheap at £90+ but awesome, and actually only cost me like £30 for this setup. :D And not a massive investment compared to the cost of a droid.
If this works well and doesn't drip, I may rig up another special one for BHD eventually. :)
But thinking about dripping, i thing the condensation may collect and drip back through to the pump, ideally a collector tank in-line would solve that, maybe an upgrade. But will most likely run the pump for a bit after smoke to try and cool and clear the system,
Wiring is done on R4, R5 needs a little more, Some scripting and more testing and i will post an update for each dome. :D
























