From the creators of R2-B4, and R2-BHD...
A Brad Robot productions...
R2-X2!
It was time for a new challenge. Being the geniuses we are, we decided to get to work on a new project, something we hadn't seen done before.
A top loading droid! An off road droid!
Most droids, including ours, are designed to run in perfect surface conditions. A gym hall floor for example. Nice, flat, hard surfaces. But when did we ever see R2 in the films limited to a gym?
So there was lots to consider. Suspension, traction, shock absorption etc.
We were in two or three minds about what to do for the feet drives. 2 driven wheels as fat as we could go, with suspension built in? Caterpillar tracks seemed ideal, but where were we going to get...
Oh ok, sweet!
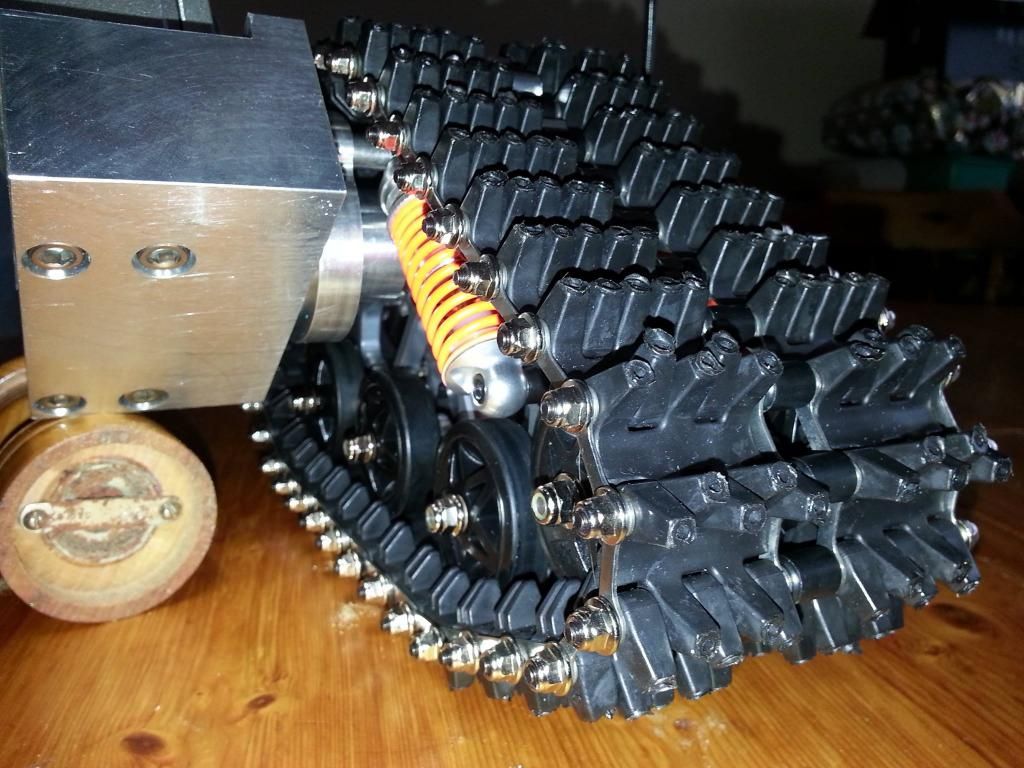
One evening searching the web and we happened across these bad boys. They're designed as an upgrade for remote controlled cars, to make them drive on sand and snow. Perfect!
Looking at the measurements, the fit inside one of R2's feet seemed too perfect to ignore. So we took a punt, and what do you know?
These even have suspension built into the them.
Now, with the perfect fit inside the foot, where do we put the motor? Well, the usual NPC wouldn't work, the drive shaft on that would be too high (we wanted a high ride anyway for clearing all the crap we're going to drive it through). But NPC's are reliable, and bullet proof. But maybe a little slow on a direct drive.
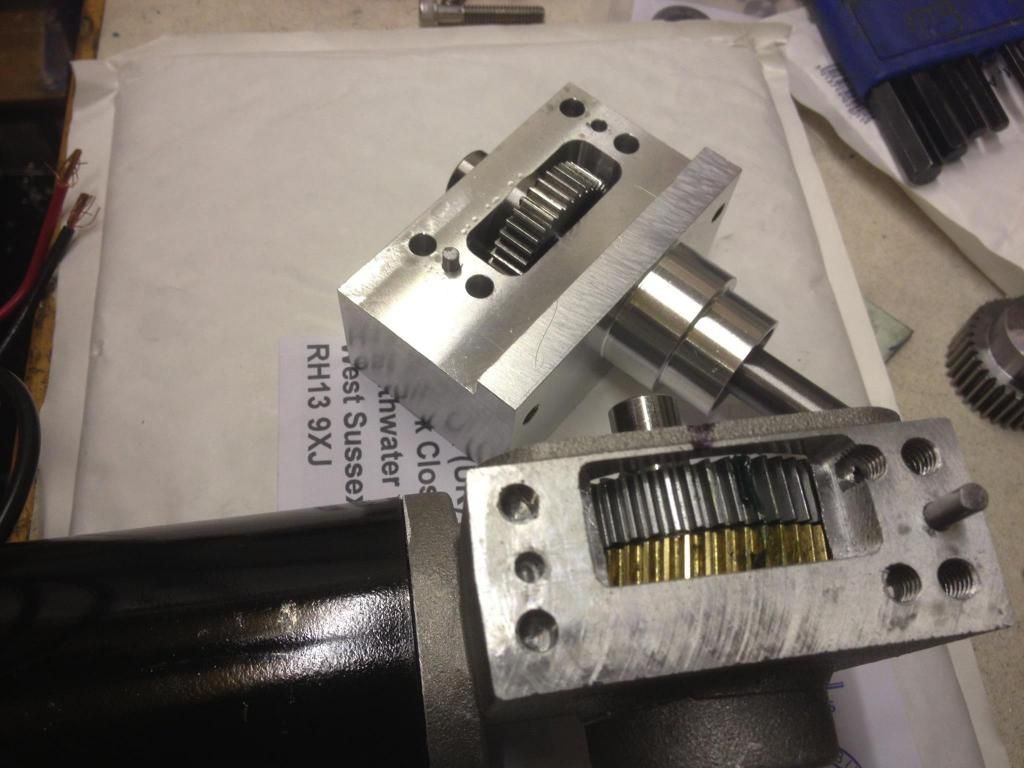
So, chatting with the father in law, we ended up with this!
Custom gear box anyone?
I'll leave you with that for now, I'm sure Brad will chime in soon :)